Assistant Professor
Mechanical Engineering, Kyung Hee University
Contact: dongjaelee@khu.ac.kr
I am an Assistant Professor in the School of Mechanical Engineering at Kyung Hee University, where I lead the Agile Robotics and Systems Lab. Before joining Kyung Hee University, I was a Postdoctoral Researcher at the Robotics Institute, Carnegie Mellon University, co-advised by Prof. Guanya Shi and Prof. Sebastian Scherer. I received the B.S. and M.S. degrees in Mechanical and Aerospace Engineering in 2018 and 2020, respectively, and the Ph.D. degree in Aerospace Engineering in 2025, all from Seoul National University, where I was advised by Prof. H. Jin Kim. In 2024, I was a visiting Ph.D. student in the Division of Decision and Control Systems at KTH Royal Institute of Technology, advised by Prof. Dimos V. Dimarogonas. My research interests span robotics and control broadly, with a particular focus on learning-based robot control and decision-making, aerial/cooperative manipulation, and whole-body control.
* equal contribution / highlighted rows indicate representative papers

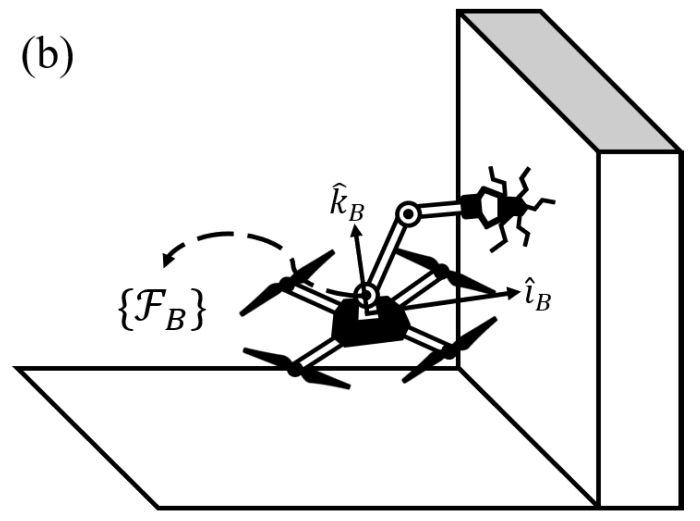
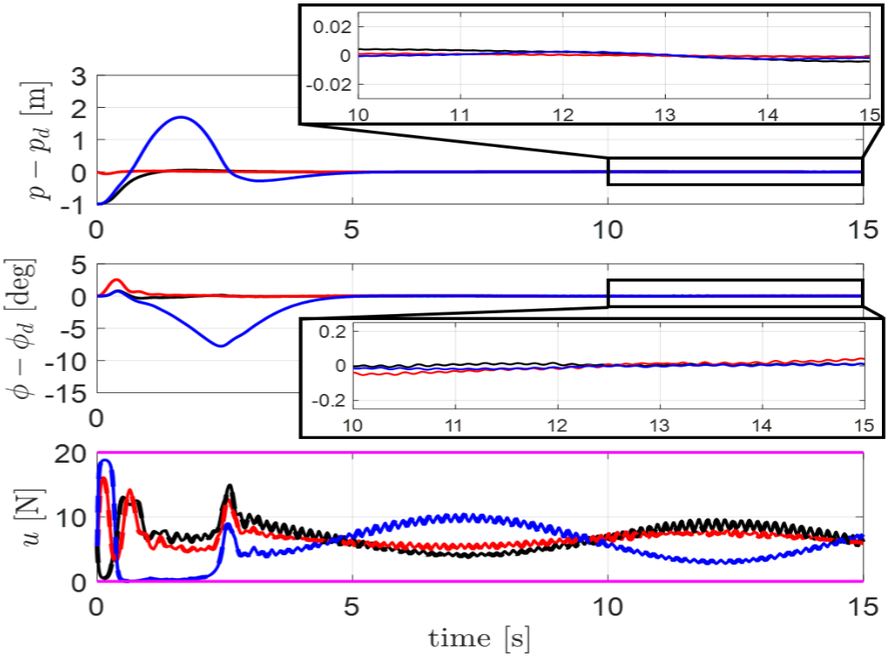
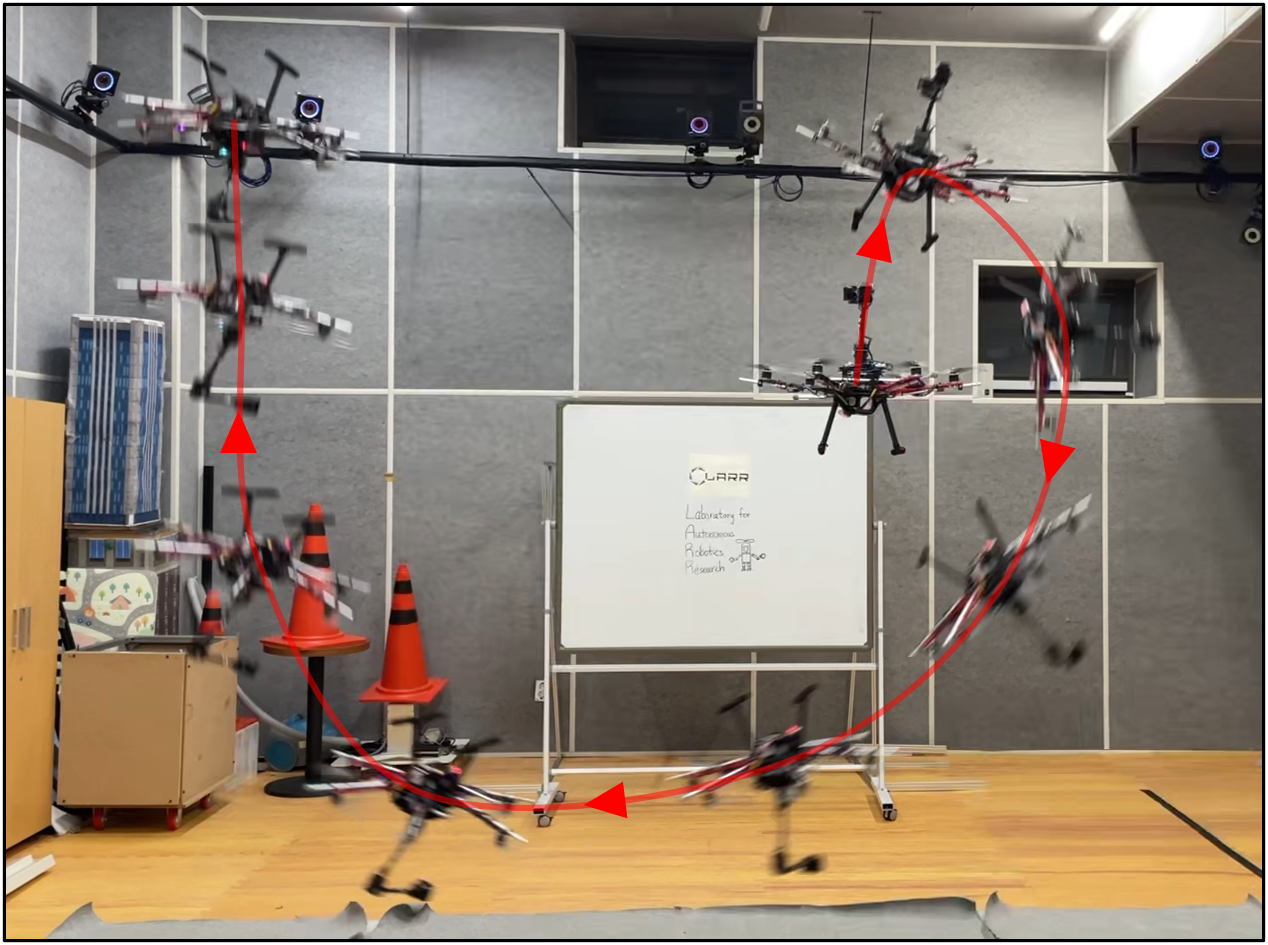
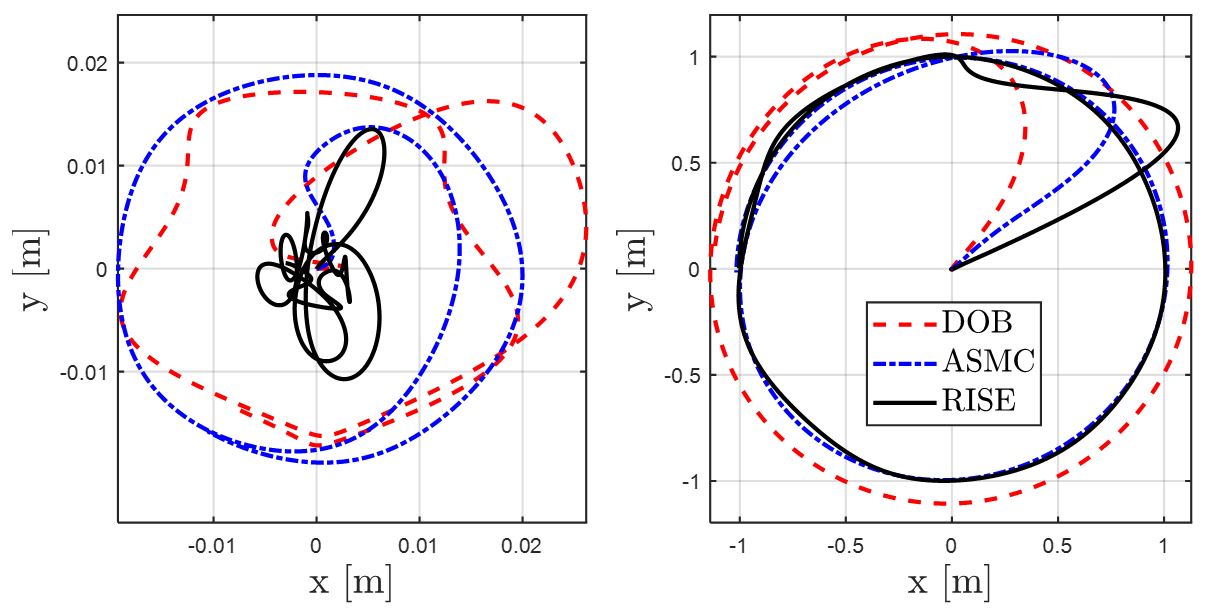
Saturated RISE control for considering rotor thrust saturation of fully actuated multirotor
2024 International Conference On Unmanned Aricraft Systems (ICUAS), 2024
Safety‑Critical Control under Multiple State and Input Constraints and Application to Fixed‑Wing UAV
2023 IEEE Conference on Decision and Control (CDC), 2023
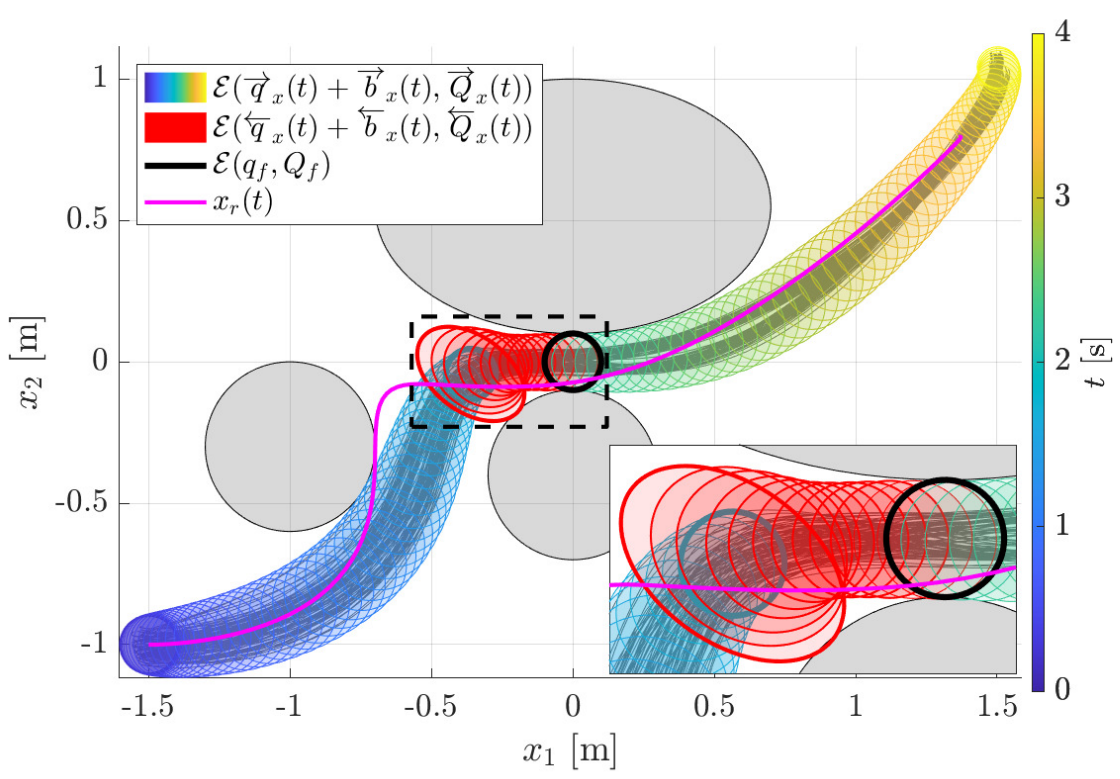
Provably safe real-time receding horizon trajectory planning for linear time-invariant systems
2020 20th International Conference on Control, Automation and Systems (ICCAS), 2020
ICCAS 2020 Outstanding Paper Award

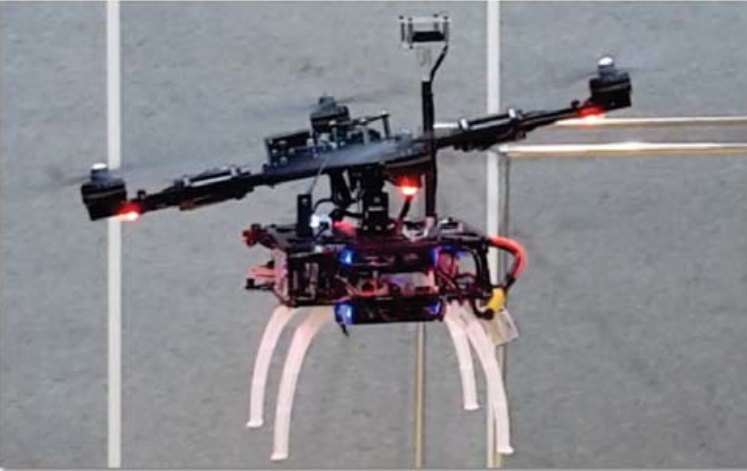
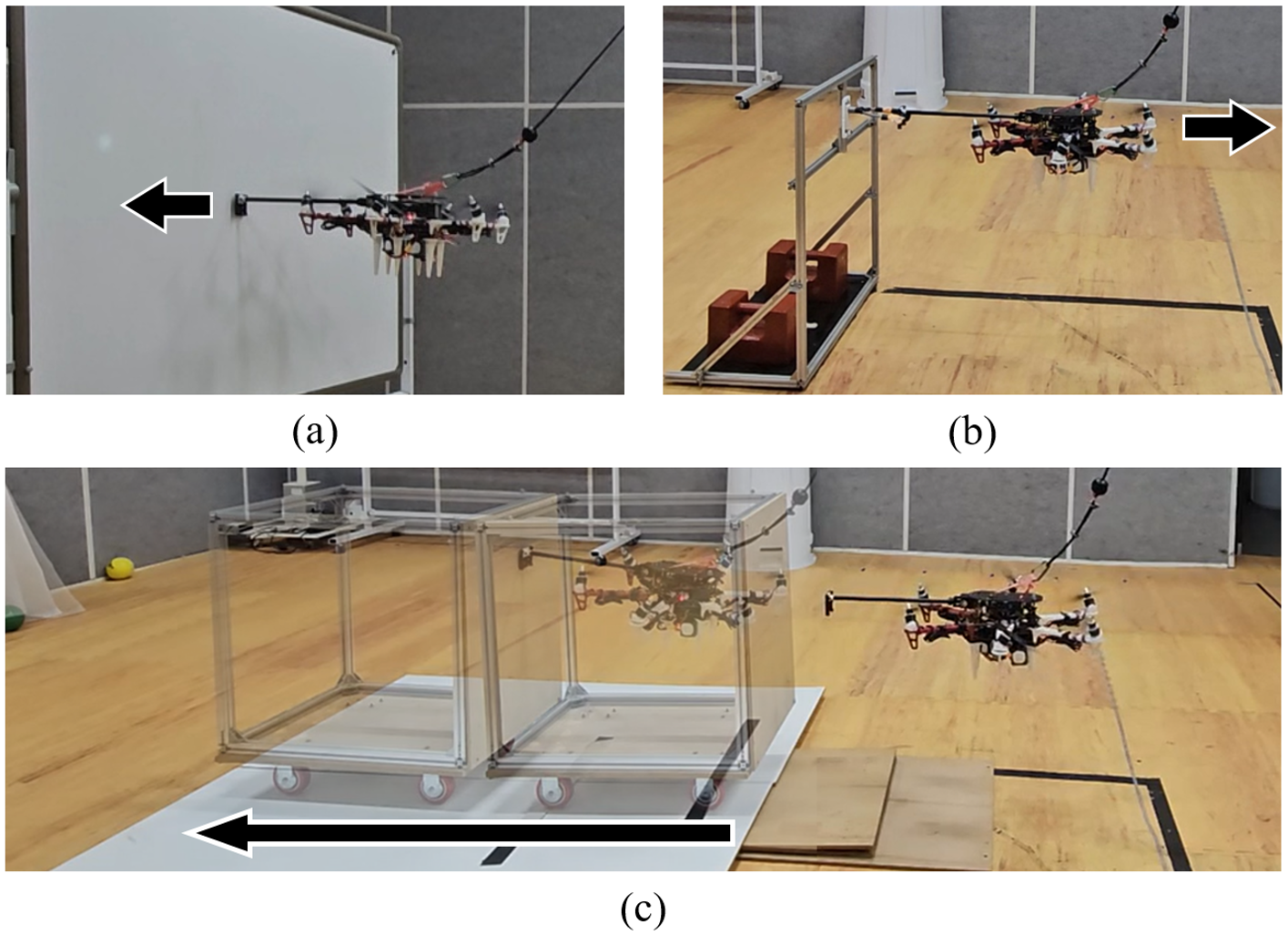
Cargo transportation strategy using T 3‑Multirotor UAV
2019 IEEE International Conference on Robotics and Automation (ICRA), 2019