Home | Research | Publications
Assistant Professor Mechanical Engineering, Kyung Hee University
Email | Curriculum Vitae | LinkedIn | Google Scholar | Youtube
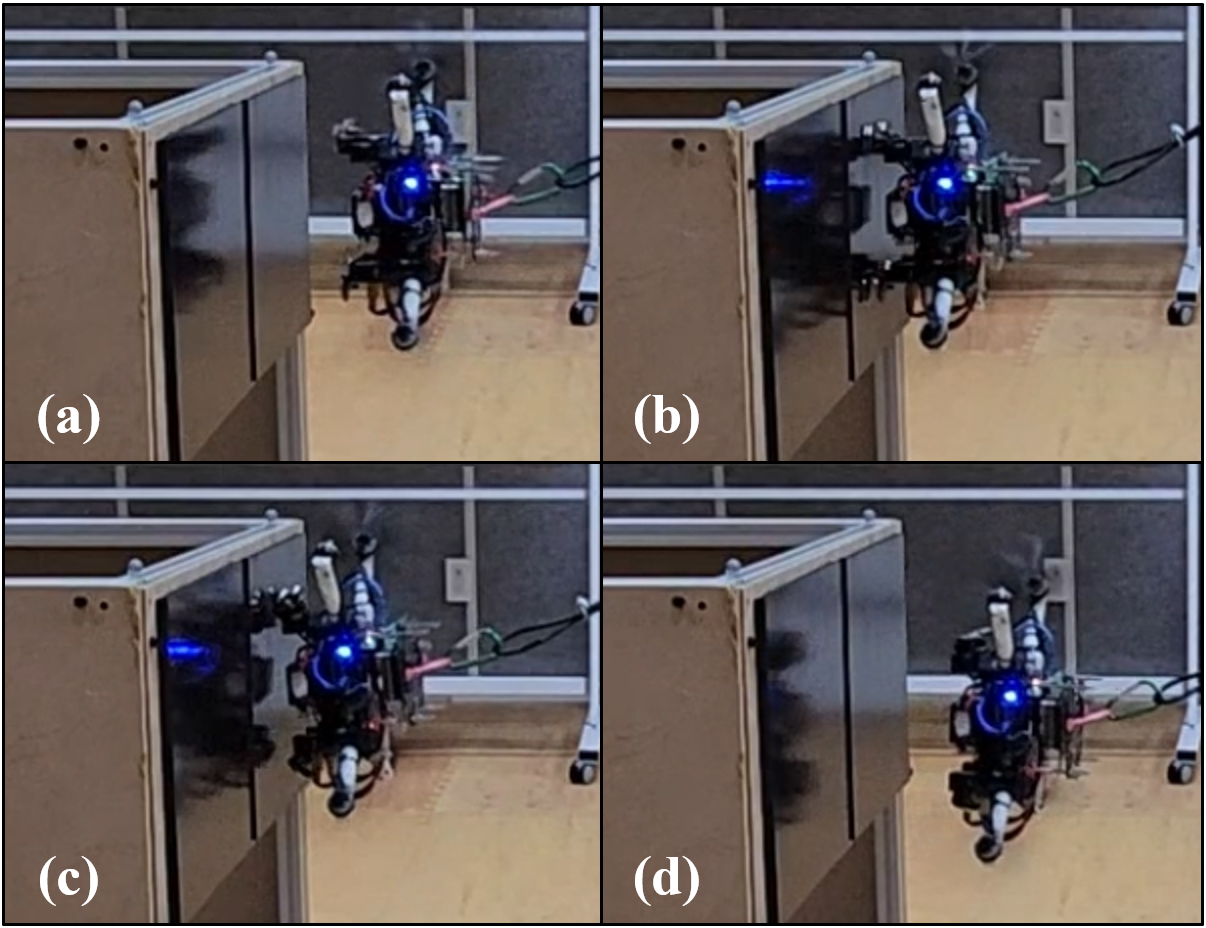
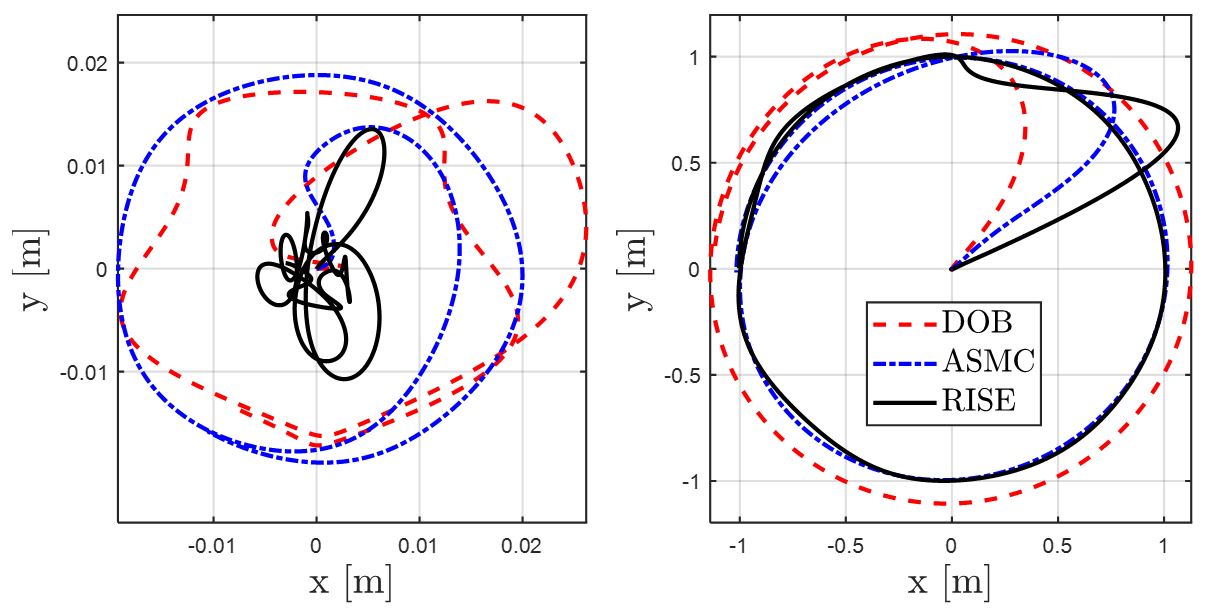
Towards dexterous aerial manipulation with guranteed stability/performance
Multirotors with additional DoFs for enhancing dexterity and applicability
Embodiment-aware learning for robot control
Cooperative control for multi-robot system
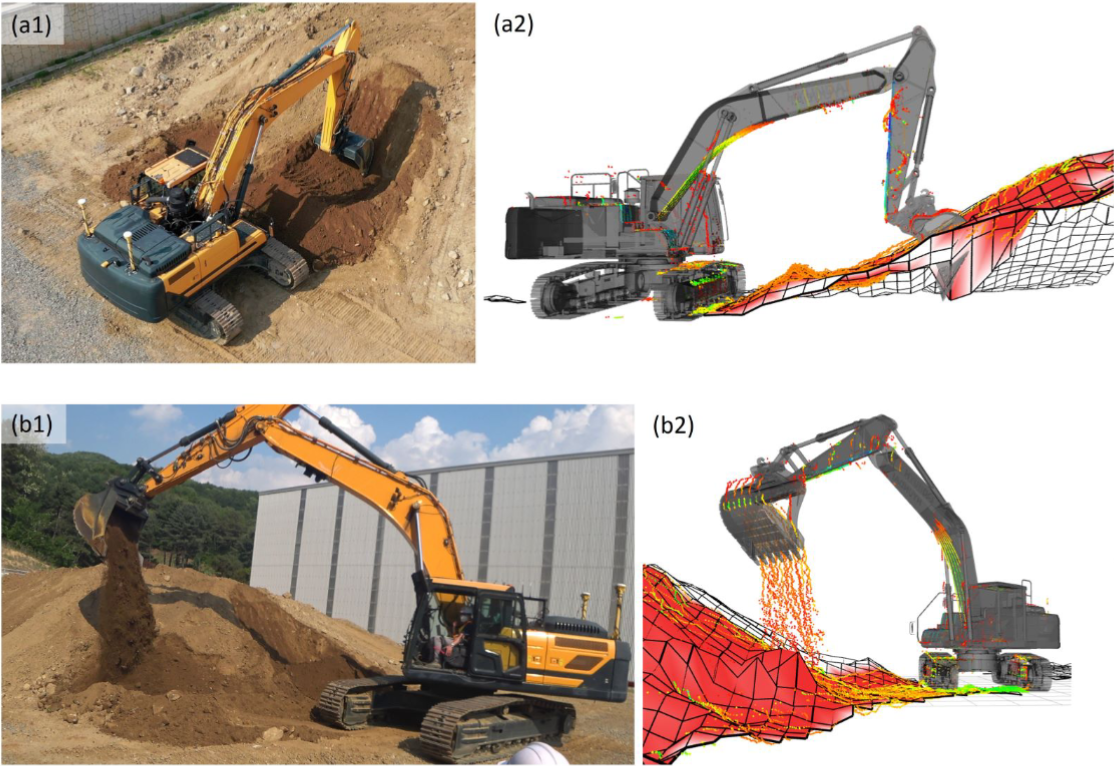
Perception, planning and hardware experiments for excavator automation
How to make a robot be robust/adaptive to disturbance and unceratinty
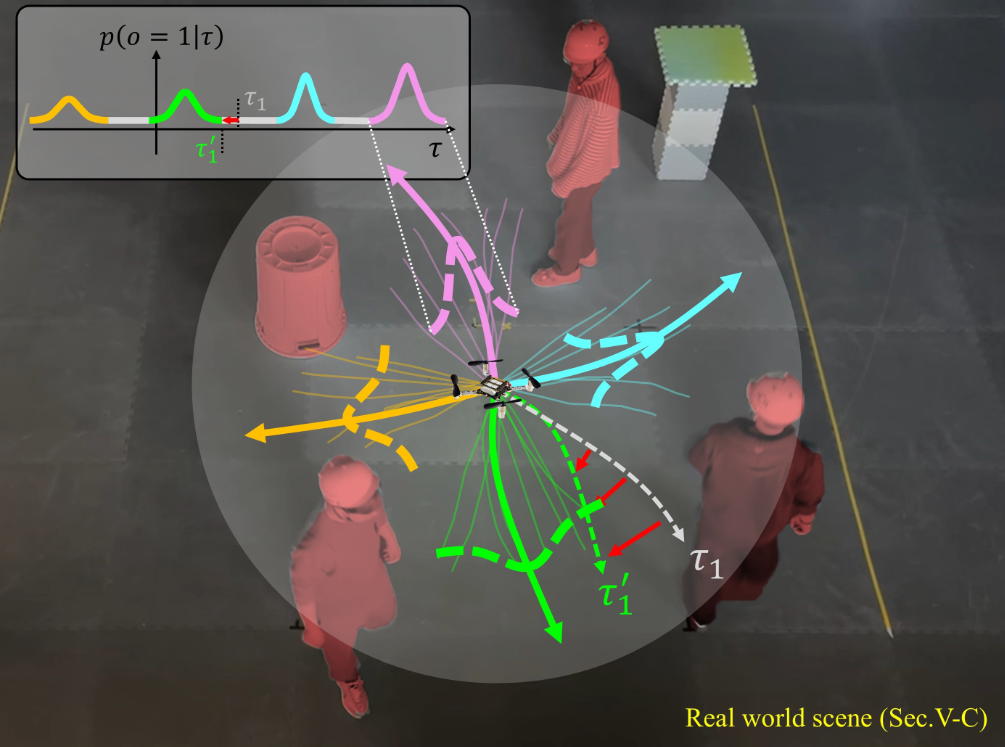
How to ensure safety in the presence of disturbance or multiple constraints