Related Publications * equal contribution / highlight 1st-authored papers
Journal Articles
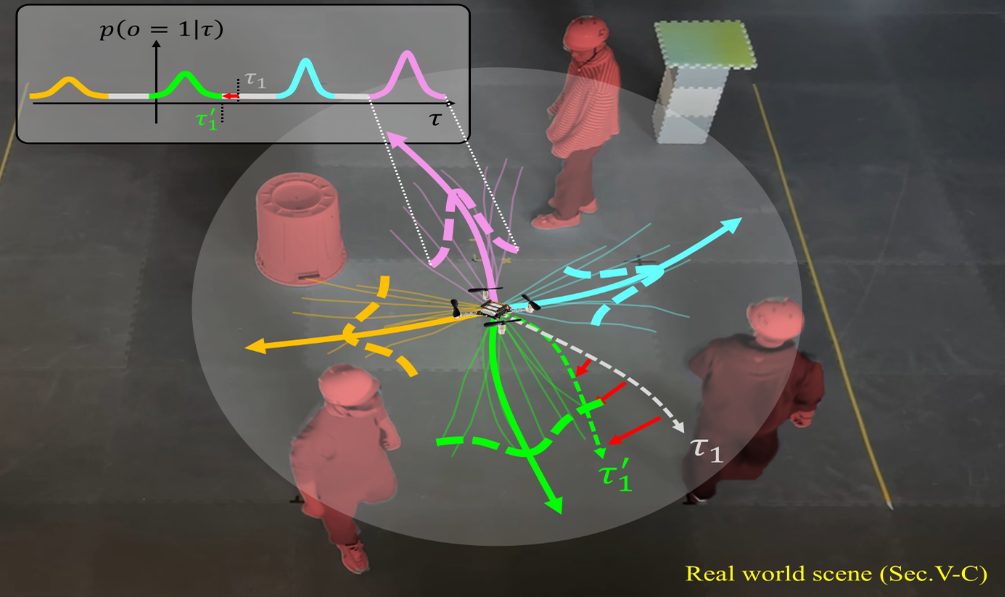
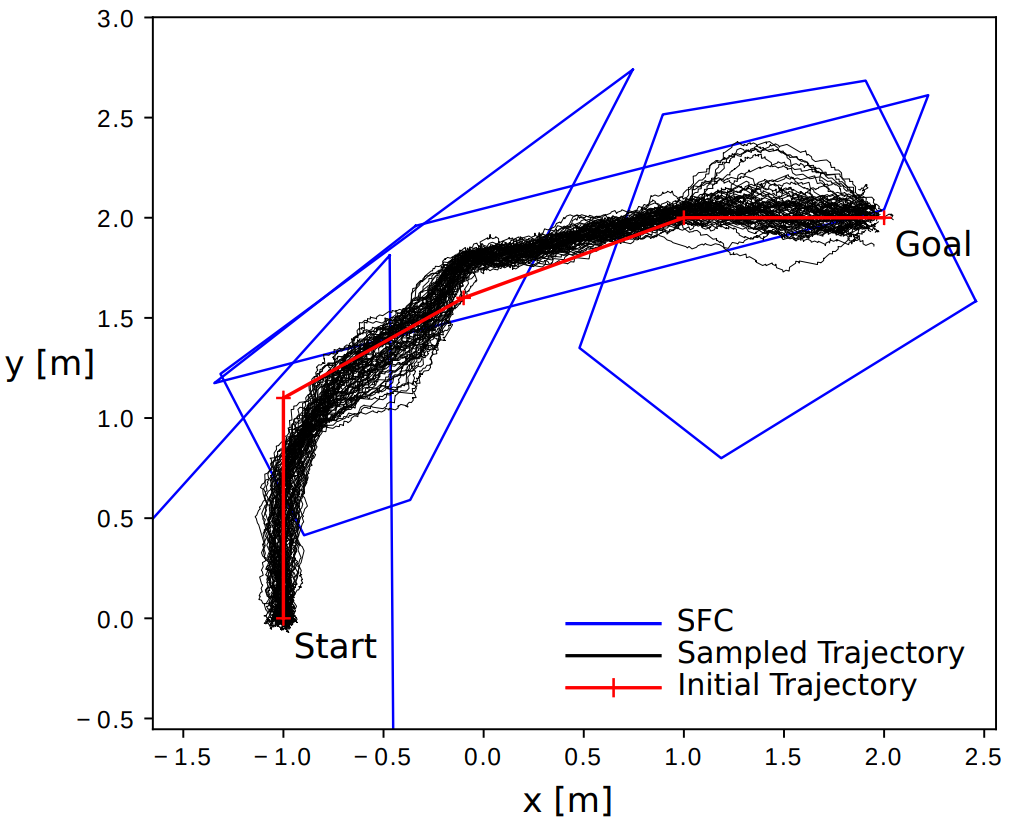
Safe Multimodal Replanning via Projection-based Trajectory Clustering in Crowded Environments
Y. Lim,
S. Jung,
D. Kim,
D. Lee,
and H. J. Kim
IEEE Robotics and Automation Letters (RAL)
2026.
(accepted)
Paper
Conference Papers
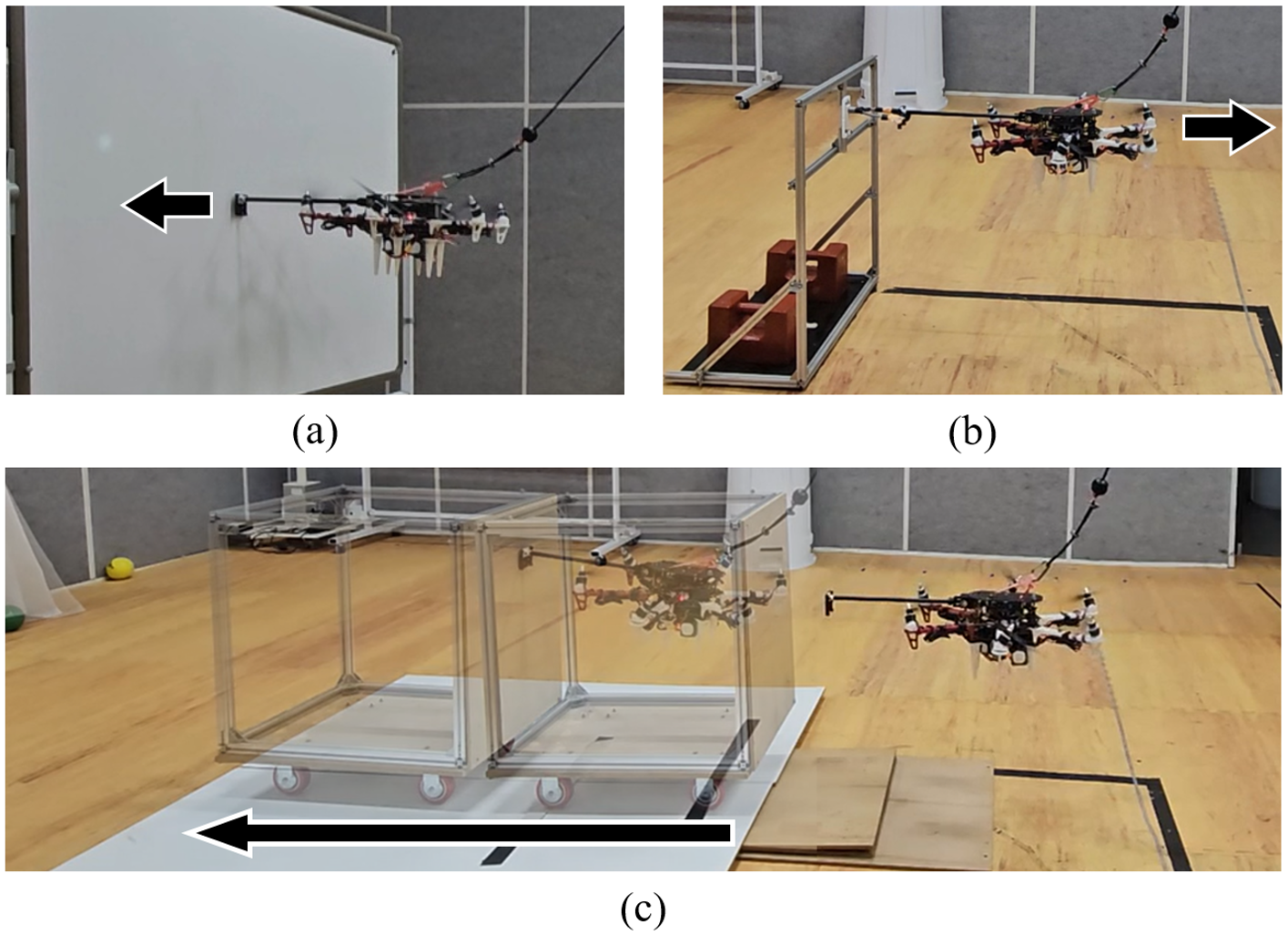
Safety-Critical Control for Aerial Physical Interaction in Uncertain Environment
J. Byun,
Y. Kim,
D. Lee,
and H. J. Kim
2025 IEEE International Conference on Robotics and Automation (ICRA) Paper |
Video
Safety‑Critical Control under Multiple State and Input Constraints and Application to Fixed‑Wing UAV
D. D. Oh*,
D. Lee*,
and H. J. Kim
2023 IEEE Conference on Decision and Control (CDC) Paper
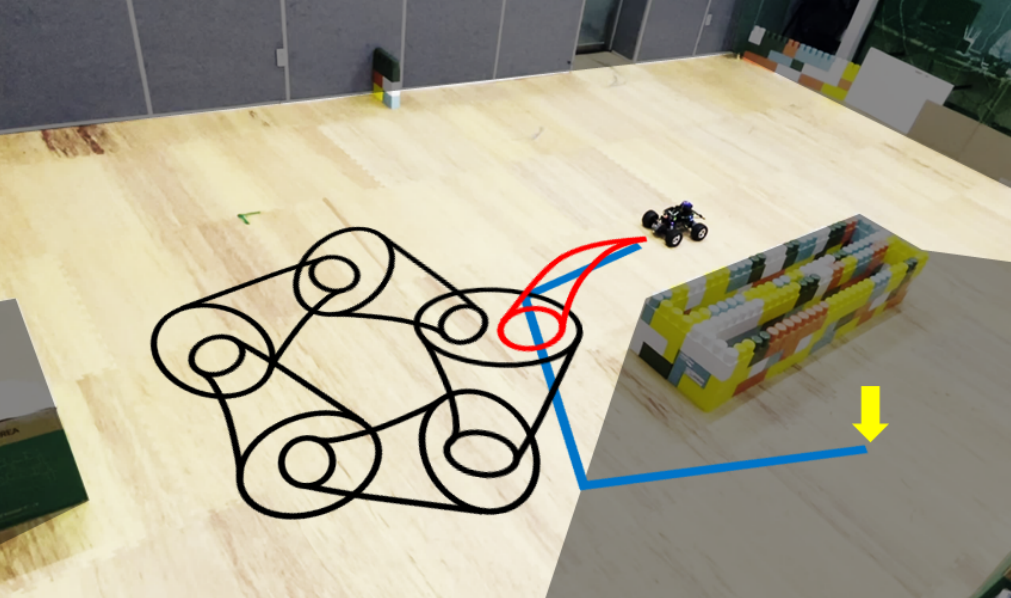
Robust and recursively feasible real-time trajectory planning in unknown environments
I. Jang,
D. Lee,
S. Lee,
and H. J. Kim
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Paper |
Video
Provably safe real-time receding horizon trajectory planning for linear time-invariant systems
I. Jang,
D. Lee,
and H. J. Kim
2020 20th International Conference on Control, Automation and Systems (ICCAS) ICCAS 2020 Outstanding Paper Award Paper
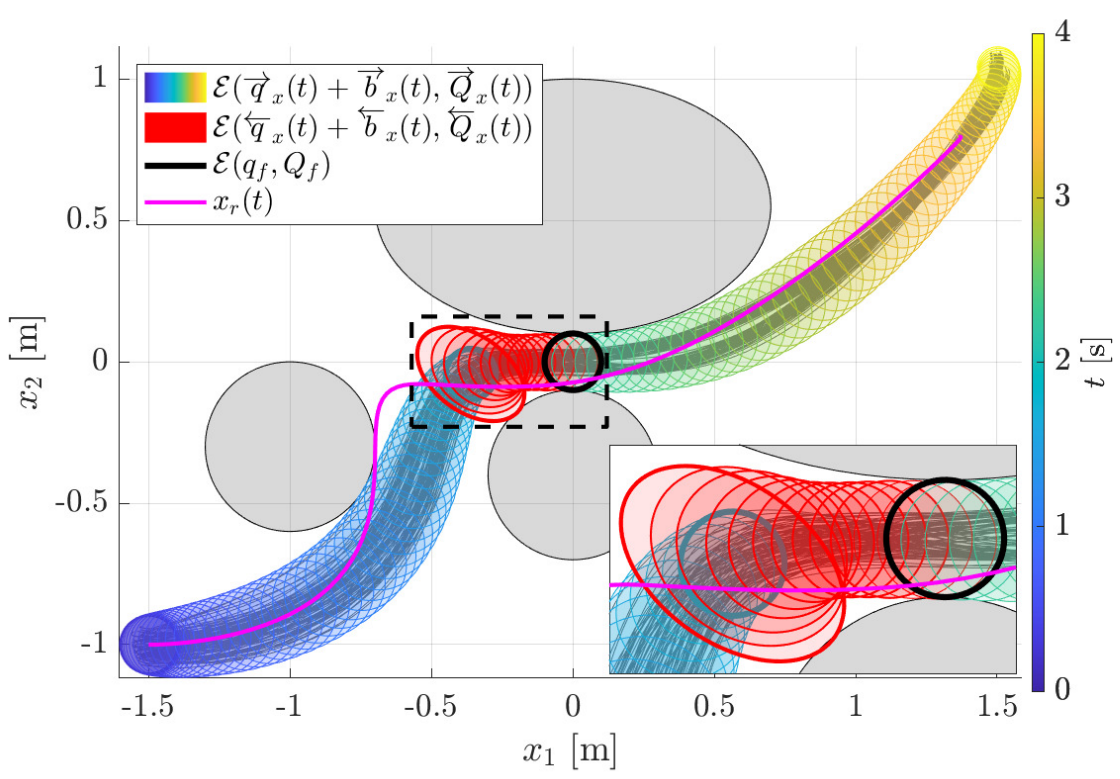
Trajectory planning with safety guaranty for a multirotor based on the forward and backward reachability analysis
H. Seo,
C. Y. Son,
D. Lee,
and H. J. Kim
2020 IEEE International Conference on Robotics and Automation (ICRA) Paper |
Video