Aerial physical interaction with robust stability guarantee against sudden collision and contact‑loss D. Lee,
J. Byun,
and H. J. Kim
Paper |
Video
Journal Articles
Switching control of underactuated multi-channel systems with input constraints for cooperative manipulation D. Lee,
D. V. Dimarogonas,
and H. J. Kim
IEEE Transactions on Control Systems Technology (TCST)
2026.
(accepted)
Paper |
Video
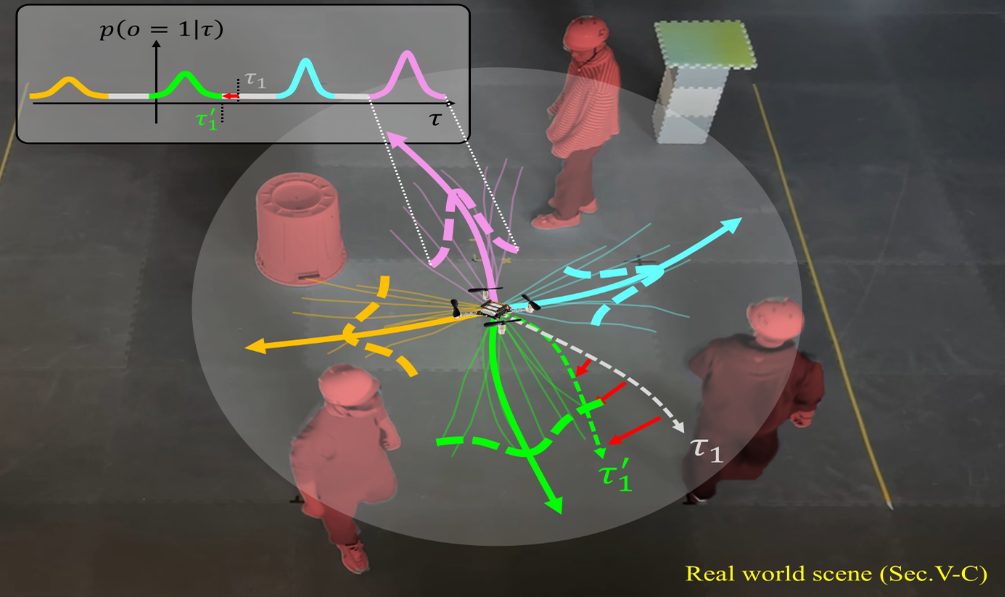
Safe Multimodal Replanning via Projection-based Trajectory Clustering in Crowded Environments
Y. Lim,
S. Jung,
D. Kim,
D. Lee,
and H. J. Kim
IEEE Robotics and Automation Letters (RAL)
2026.
(accepted)
Paper
Autonomous Aerial Manipulation at Arbitrary Pose in SE(3) with Robust Control and Whole-body Planning D. Lee*,
B. Kim*,
and H. J. Kim
The International Journal of Robotics Research (IJRR)
2025.
(accepted)
Paper |
Video
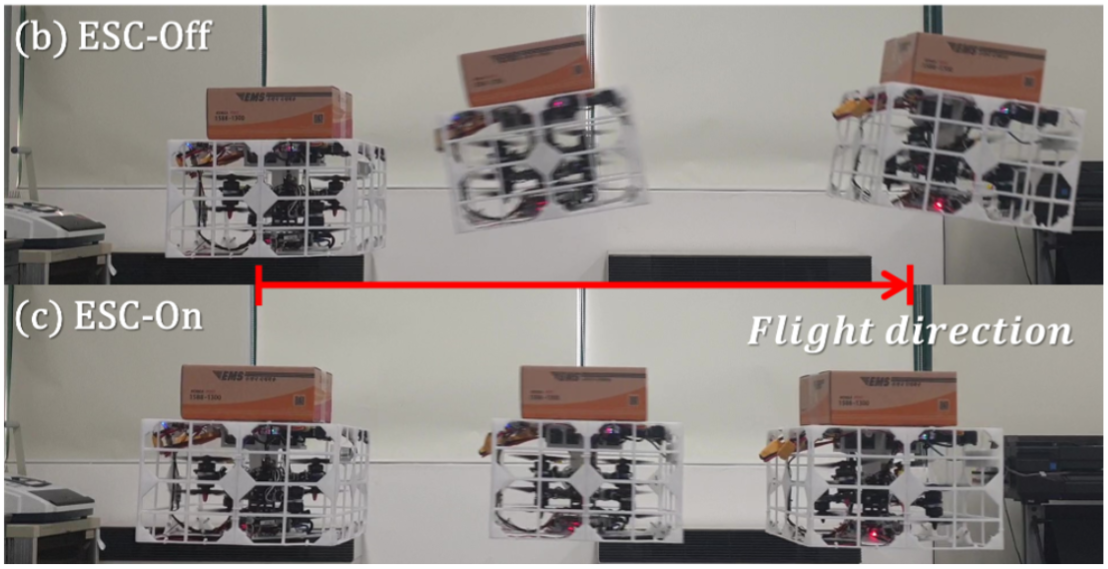
Autonomous Heavy Object Pushing Using a Coaxial Tiltrotor
S. Hwang*,
D. Lee*,
C. Kim,
and H. J. Kim
IEEE Transactions on Automation Science and Engineering (T-ASE)
vol. 22,
pp. 4243-4256,
2025.
Paper |
Video
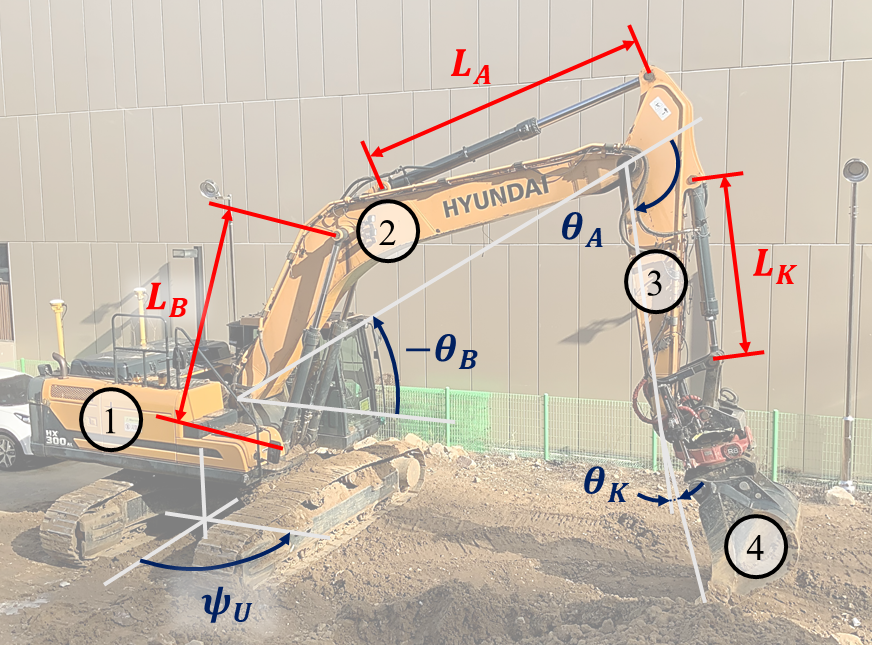
Towards Fully Integrated Autonomous Excavation: Autonomous Excavator for Precise Earth Cutting and Onboard Landscape Inspection
I. Jang*,
J. Kim*,
D. Lee*,
C. Kim*,
C. Oh,
Y. Kim,
S. Woo,
H. Sung,
and H. J. Kim
IEEE Robotics and Automation Magazine (RAM)
vol. 32,
no. 3,
pp. 88-102,
September 2025.
Paper |
Video
The Palletrone Cart: Human-Robot Interaction-Based Aerial Cargo Transportation
G. Park,
H. Park,
W. Park,
D. Lee,
M. Kim,
and S. J. Lee
IEEE Robotics and Automation Letters (RAL)
vol. 9,
no. 8,
pp. 6999-7006,
August 2024.
Paper |
Video
A hybrid controller enhancing transient performance for an aerial manipulator extracting a wedged object
J. Byun,
I. Jang,
D. Lee,
and H. J. Kim
IEEE Transactions on Automation Science and Engineering (T-ASE)
vol. 21,
no. 3,
July 2024.
Paper |
Video
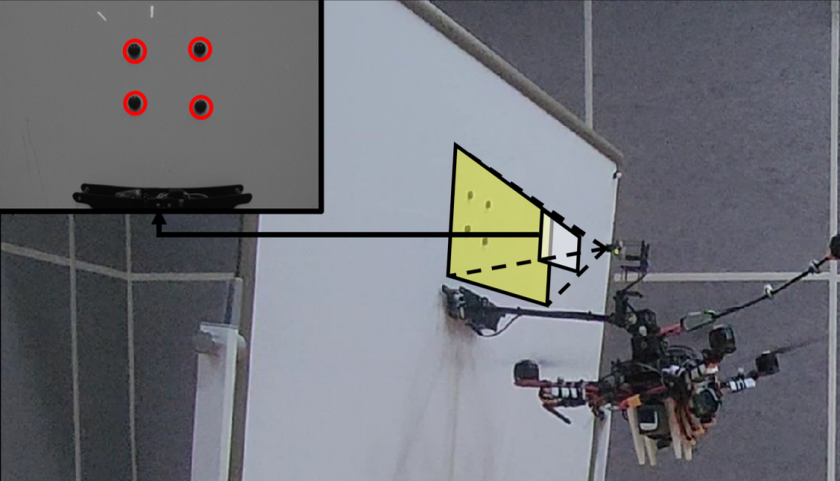
Image‑Based Time‑Varying Contact Force Control of Aerial Manipulator using Robust Impedance Filter
J. Byun,
J. Kim,
D. Eom,
D. Lee,
C. Kim,
and H. J. Kim
IEEE Robotics and Automation Letters (RAL)
vol. 9,
no. 5,
pp. 4854-4861,
April 2024.
Paper |
Video
Design, Modeling and Control of a Top‑loading Fully‑Actuated Cargo Transportation Multirotor
W. Park,
X. Wu,
D. Lee,
and S. J. Lee
IEEE Robotics and Automation Letters (RAL)
vol. 8,
no. 9,
pp. 5807-5814,
July 2023.
Paper |
Video
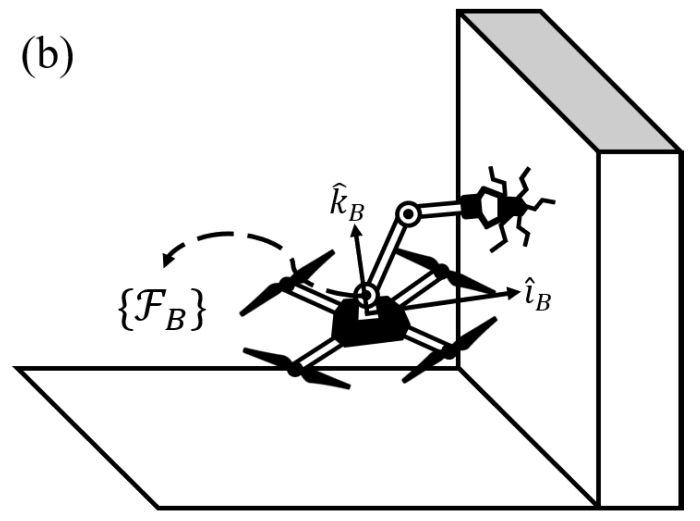
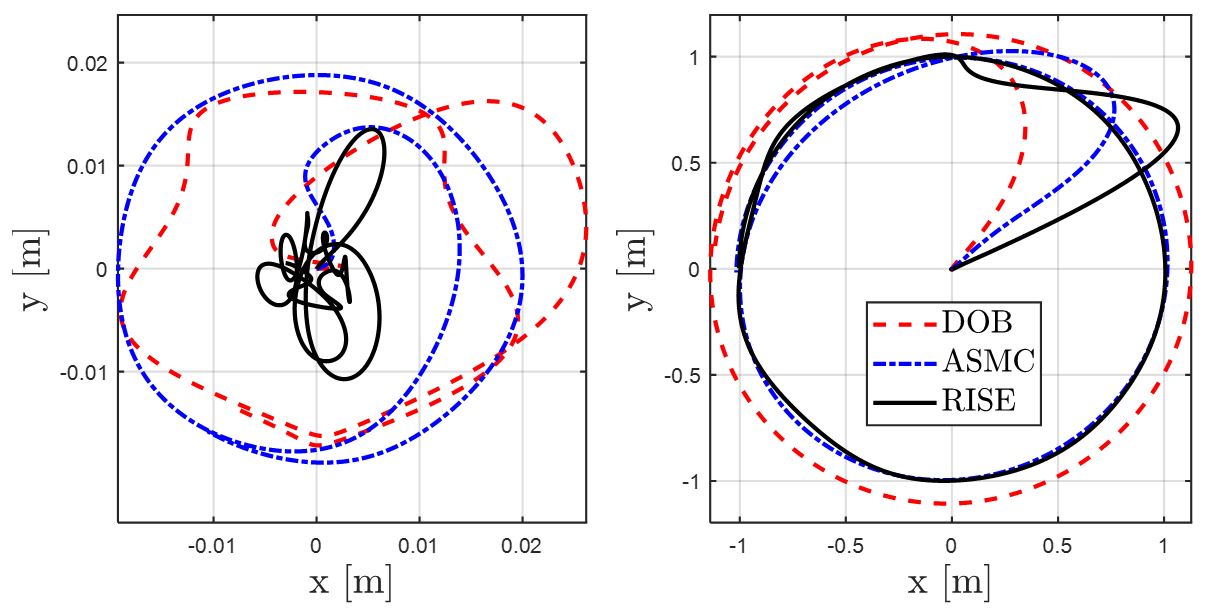
RISE‑based trajectory tracking control of an aerial manipulator under uncertainty D. Lee,
J. Byun,
and H. J. Kim
IEEE Control Systems Letters (L-CSS)
vol. 6,
pp. 3379-3384,
June 2022.
Paper |
Video
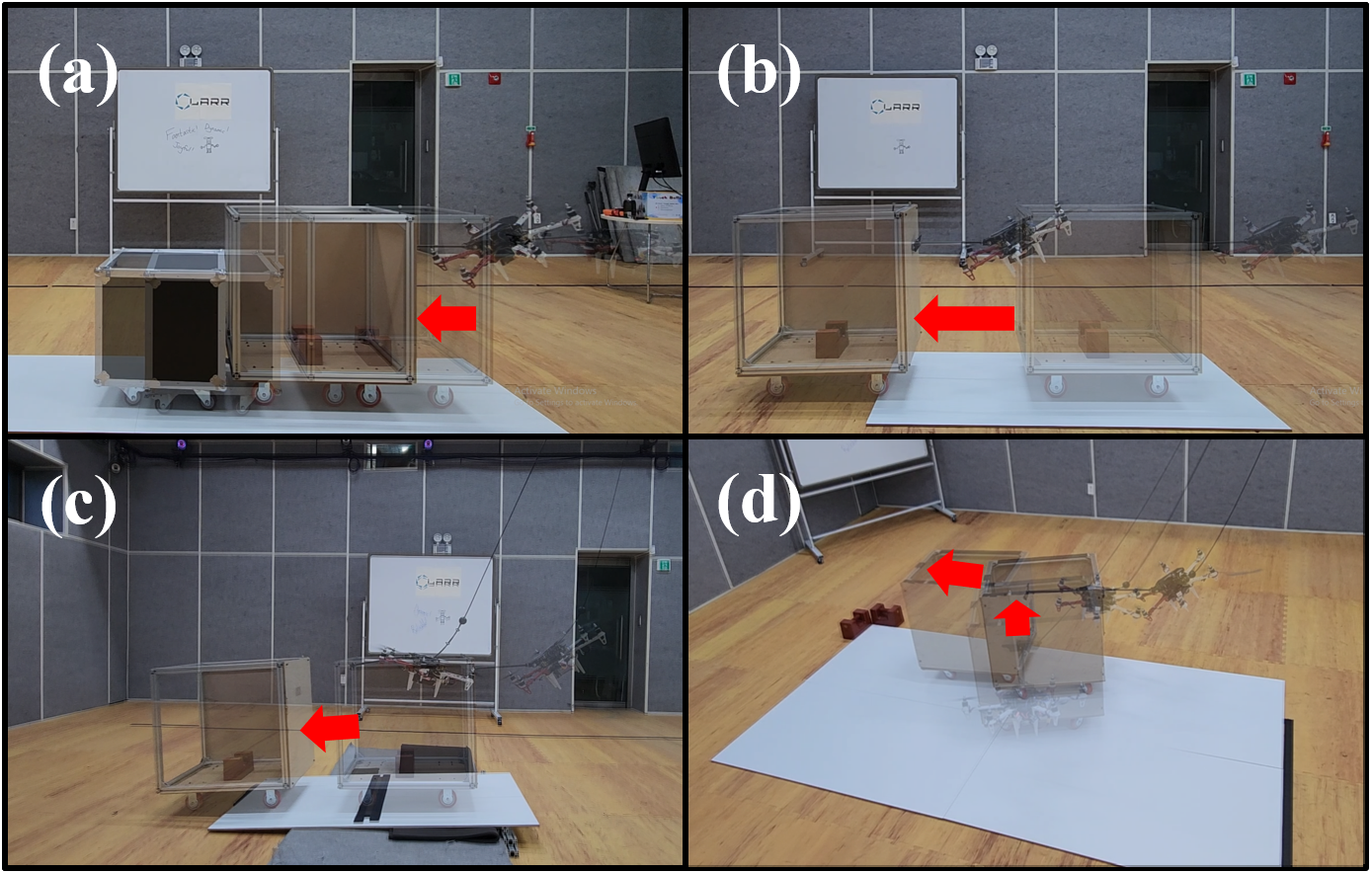
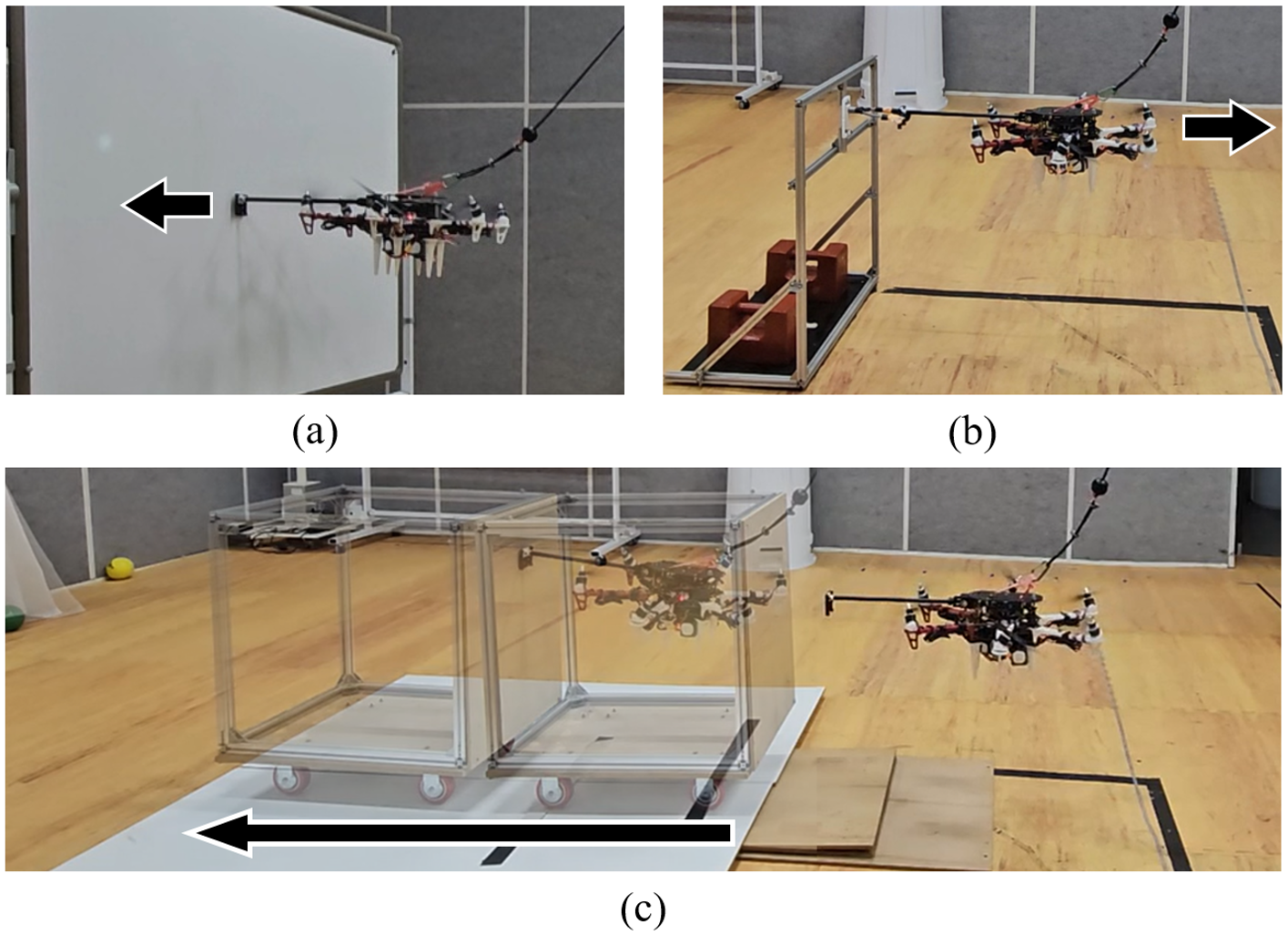
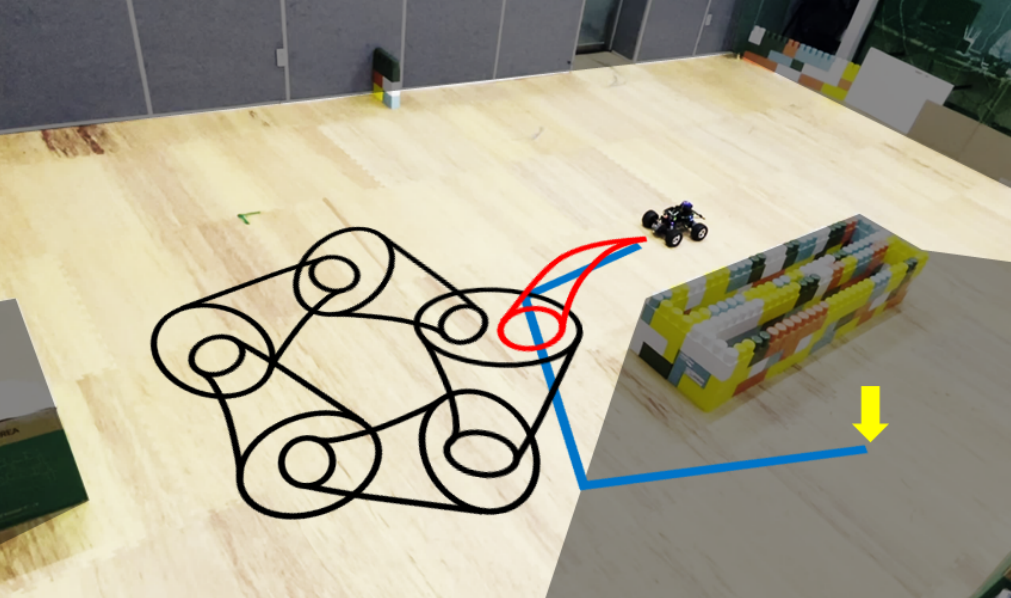
Aerial manipulator pushing a movable structure using a DOB-based robust controller D. Lee,
H. Seo,
I. Jang,
S. J. Lee,
and H. J. Kim
IEEE Robotics and Automation Letters (RAL)
vol. 6,
no. 2,
pp. 723-730,
April 2021.
ICRA 2021 Best Paper Award on Unmanned Aerial Vehicles Paper |
Video
Fully actuated autonomous flight of thruster-tilting multirotor
S. J. Lee,
D. Lee,
J. Kim,
D. Kim,
I. Jang,
and H. J. Kim
IEEE/ASME Transactions on Mechatronics (T-MECH)
vol. 26,
no. 2,
pp. 765-776,
April 2021.
Paper |
Video
Conference Papers
UMI-on-Air: Embodiment-Aware Guidance for Embodiment-Agnostic Visuomotor Policies
H. Gupta,
X. Guo,
H. Ha,
C. Pan,
M. Cao,
D. Lee,
S. Scherer,
S. Song,
and G. Shi
2026 IEEE International Conference on Robotics and Automation (ICRA) Paper |
Website
Geometric Backstepping Control of Omnidirectional Tiltrotors Incorporating Servo–Rotor Dynamics for Robustness against Sudden Disturbances
J. Lee*,
D. Lee*,
J. Lee,
H. Lee,
Y. Kim,
and H. J. Kim
2026 IEEE International Conference on Robotics and Automation (ICRA) Paper
Safety-Critical Control for Aerial Physical Interaction in Uncertain Environment
J. Byun,
Y. Kim,
D. Lee,
and H. J. Kim
2025 IEEE International Conference on Robotics and Automation (ICRA) Paper |
Video
Saturated RISE control for considering rotor thrust saturation of fully actuated multirotor D. Lee,
and H. J. Kim
2024 International Conference On Unmanned Aricraft Systems (ICUAS) Paper
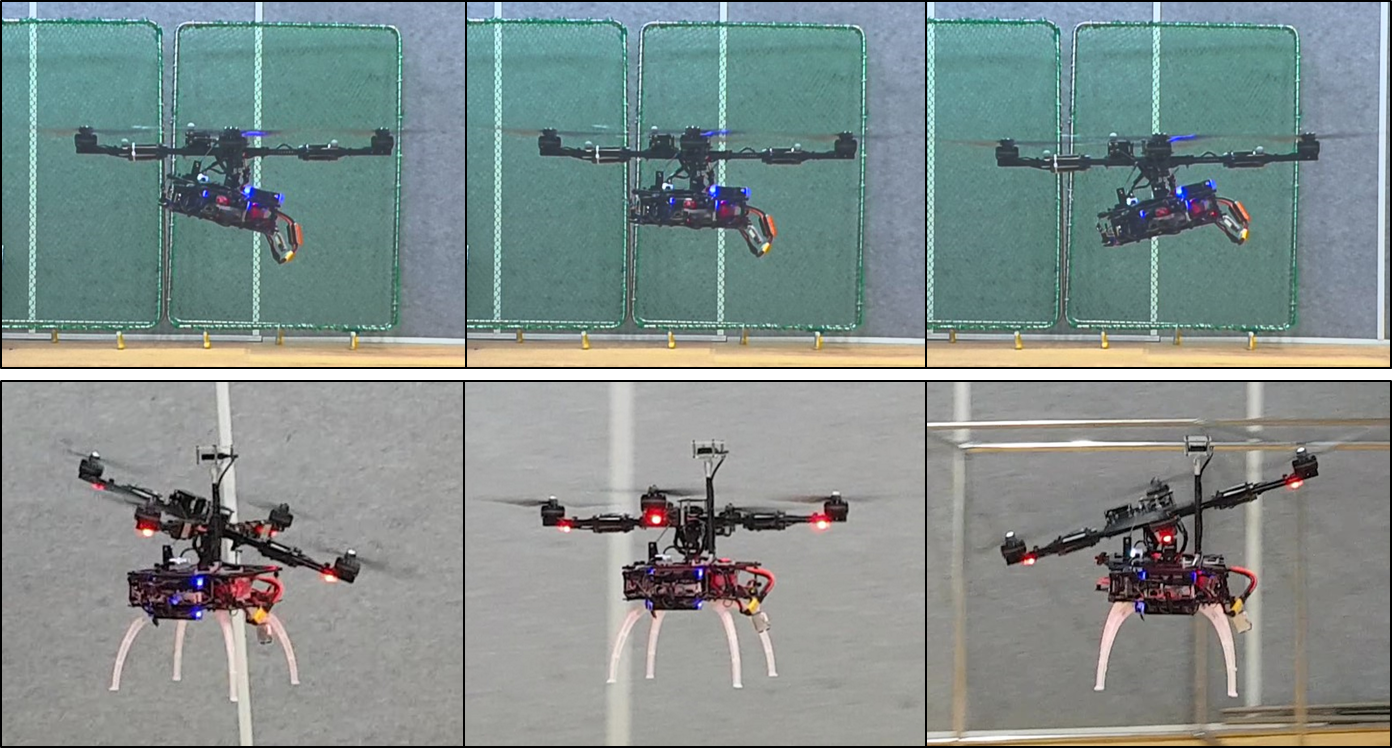
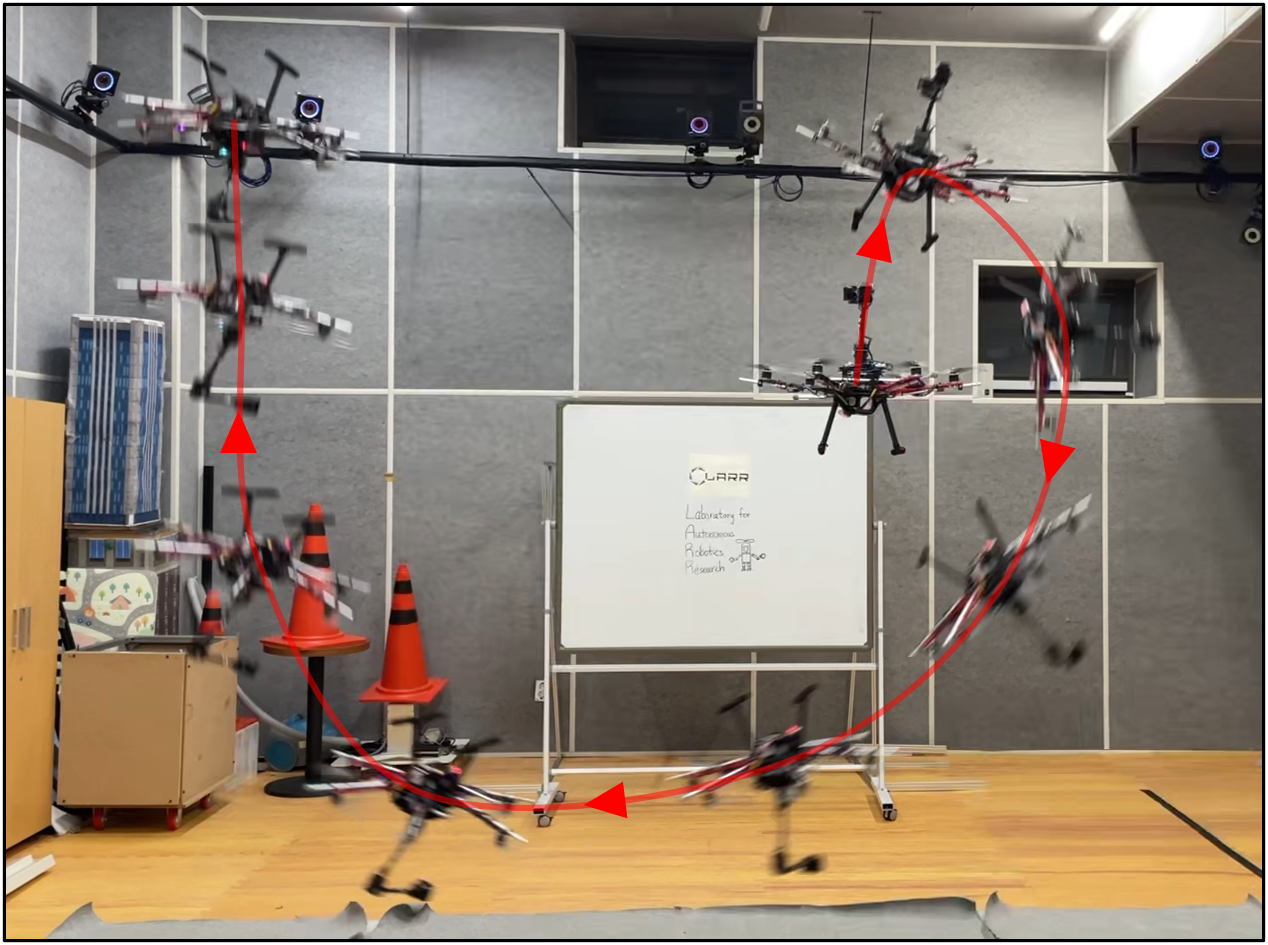
Autonomous aerial perching and unperching using omnidirectional tiltrotor and switching controller D. Lee,
S. Hwang,
J. Byun,
S. J. Lee,
and H. J. Kim
2024 IEEE International Conference on Robotics and Automation (ICRA) Paper |
Video
Safety‑Critical Control under Multiple State and Input Constraints and Application to Fixed‑Wing UAV
D. D. Oh*,
D. Lee*,
and H. J. Kim
2023 IEEE Conference on Decision and Control (CDC) Paper
Minimally actuated tiltrotor for perching and normal force exertion D. Lee,
S. Hwang,
C. Kim,
S. J. Lee,
and H. J. Kim
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Paper |
Video
Globally Defined Dynamic Modelling and Geometric Tracking Controller Design for Aerial Manipulator
B. Kim,
D. Lee,
J. Byun,
and H. J. Kim
2023 IEEE International Conference on Robotics and Automation (ICRA) Paper |
Video
Real-time motion planning of a hydraulic excavator using trajectory optimization and model predictive control D. Lee*,
I. Jang*,
J. Byun,
H. Seo,
and H. J. Kim
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Paper |
Video
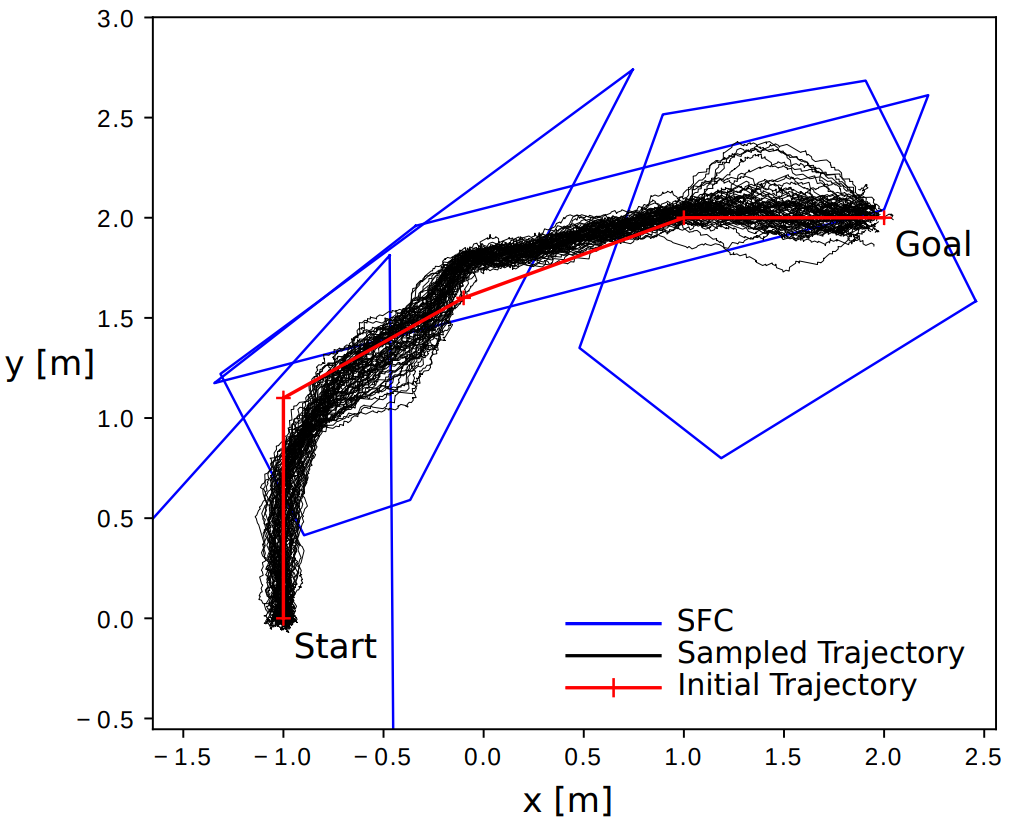
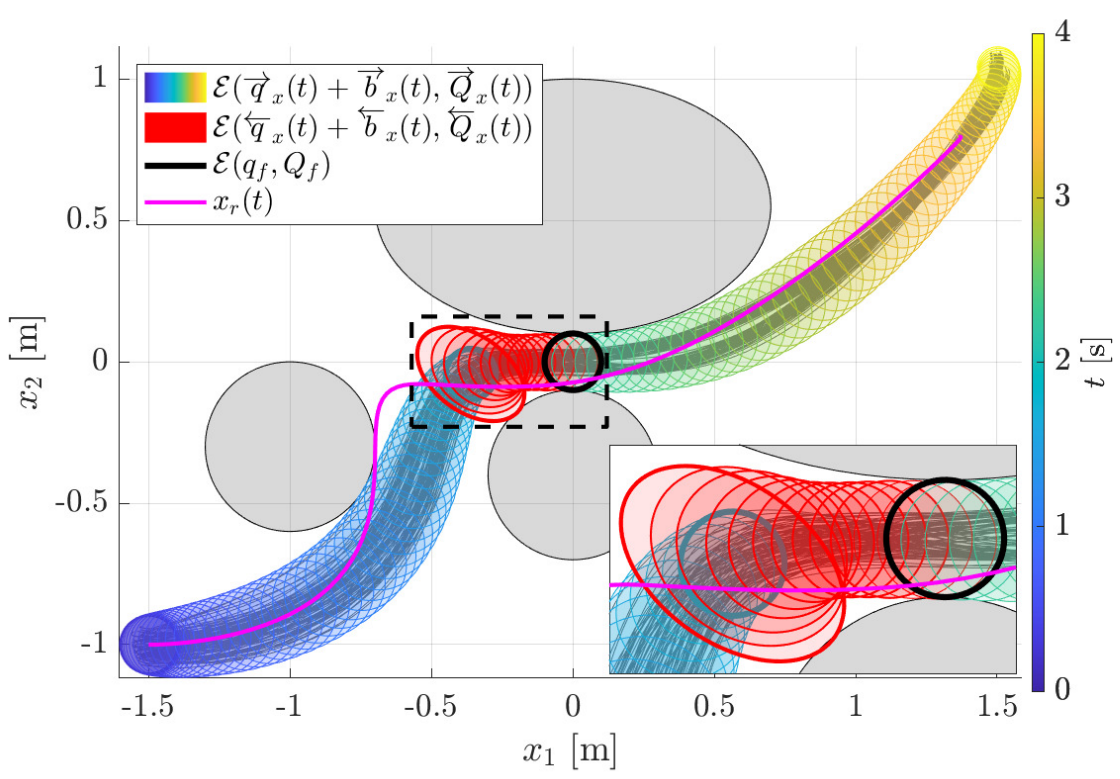
Robust and recursively feasible real-time trajectory planning in unknown environments
I. Jang,
D. Lee,
S. Lee,
and H. J. Kim
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Paper |
Video
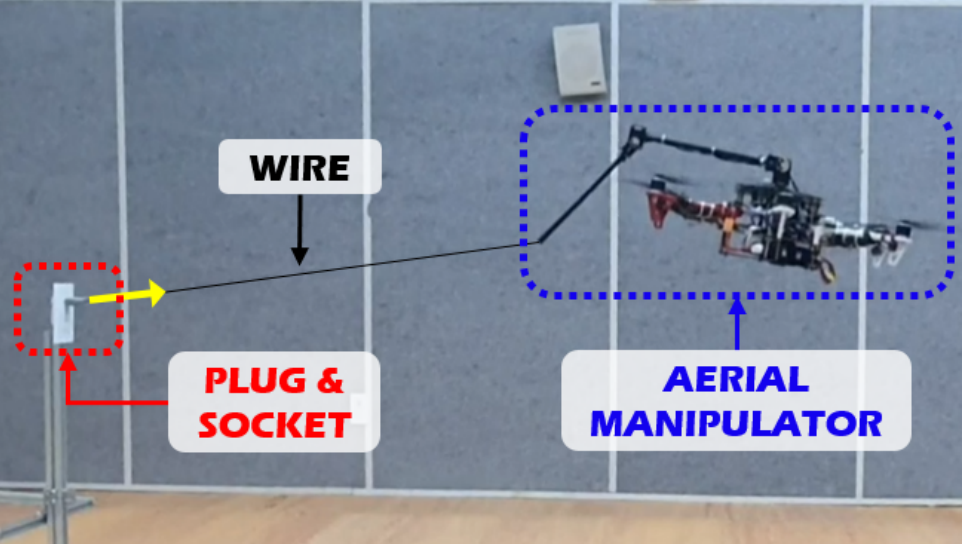
Stability and robustness analysis of plug-pulling using an aerial manipulator
J. Byun,
D. Lee,
H. Seo,
I. Jang,
J. Choi,
and H. J. Kim
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Paper |
Video
Provably safe real-time receding horizon trajectory planning for linear time-invariant systems
I. Jang,
D. Lee,
and H. J. Kim
2020 20th International Conference on Control, Automation and Systems (ICCAS) ICCAS 2020 Outstanding Paper Award Paper
Aerial manipulation using model predictive control for opening a hinged door D. Lee,
H. Seo,
D. Kim,
and H. J. Kim
2020 IEEE International Conference on Robotics and Automation (ICRA) Paper |
Video
Trajectory planning with safety guaranty for a multirotor based on the forward and backward reachability analysis
H. Seo,
C. Y. Son,
D. Lee,
and H. J. Kim
2020 IEEE International Conference on Robotics and Automation (ICRA) Paper |
Video
Cargo transportation strategy using T 3‑Multirotor UAV
S. J. Lee,
D. Lee,
and H. J. Kim
2019 IEEE International Conference on Robotics and Automation (ICRA) Paper