Related Publications * equal contribution / highlight 1st-authored papers
Journal Articles
Autonomous Aerial Manipulation at Arbitrary Pose in SE(3) with Robust Control and Whole-body Planning D. Lee*,
B. Kim*,
and H. J. Kim
The International Journal of Robotics Research (IJRR)
2025.
(accepted)
Paper |
Video
Autonomous Heavy Object Pushing Using a Coaxial Tiltrotor
S. Hwang*,
D. Lee*,
C. Kim,
and H. J. Kim
IEEE Transactions on Automation Science and Engineering (T-ASE)
vol. 22,
pp. 4243-4256,
2025.
Paper |
Video
The Palletrone Cart: Human-Robot Interaction-Based Aerial Cargo Transportation
G. Park,
H. Park,
W. Park,
D. Lee,
M. Kim,
and S. J. Lee
IEEE Robotics and Automation Letters (RAL)
vol. 9,
no. 8,
pp. 6999-7006,
August 2024.
Paper |
Video
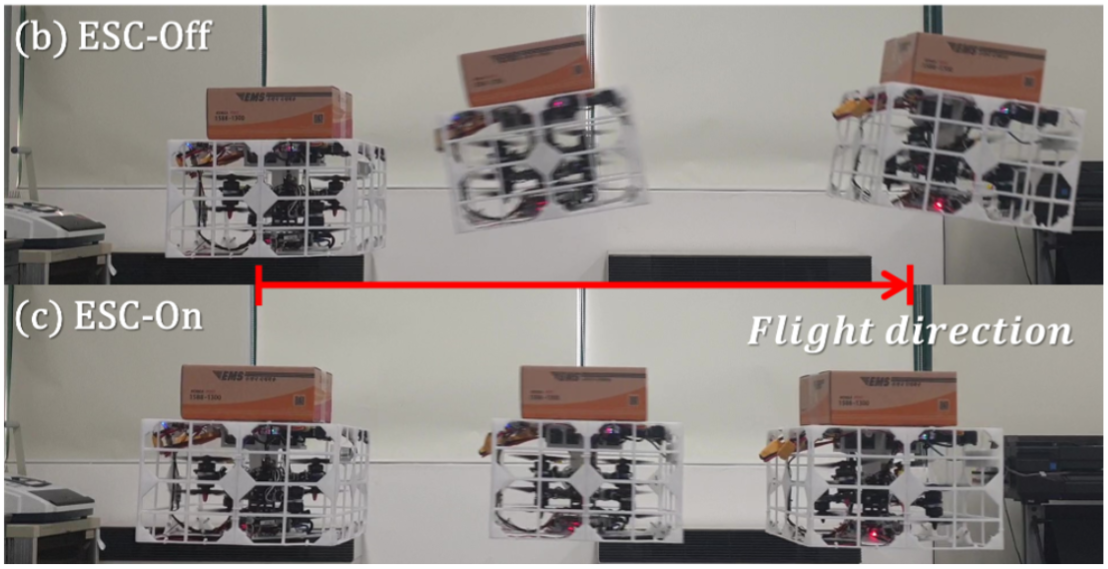
Design, Modeling and Control of a Top‑loading Fully‑Actuated Cargo Transportation Multirotor
W. Park,
X. Wu,
D. Lee,
and S. J. Lee
IEEE Robotics and Automation Letters (RAL)
vol. 8,
no. 9,
pp. 5807-5814,
July 2023.
Paper |
Video
Fully actuated autonomous flight of thruster-tilting multirotor
S. J. Lee,
D. Lee,
J. Kim,
D. Kim,
I. Jang,
and H. J. Kim
IEEE/ASME Transactions on Mechatronics (T-MECH)
vol. 26,
no. 2,
pp. 765-776,
April 2021.
Paper |
Video
Conference Papers
Geometric Backstepping Control of Omnidirectional Tiltrotors Incorporating Servo–Rotor Dynamics for Robustness against Sudden Disturbances
J. Lee*,
D. Lee*,
J. Lee,
H. Lee,
Y. Kim,
and H. J. Kim
2026 IEEE International Conference on Robotics and Automation (ICRA) Paper
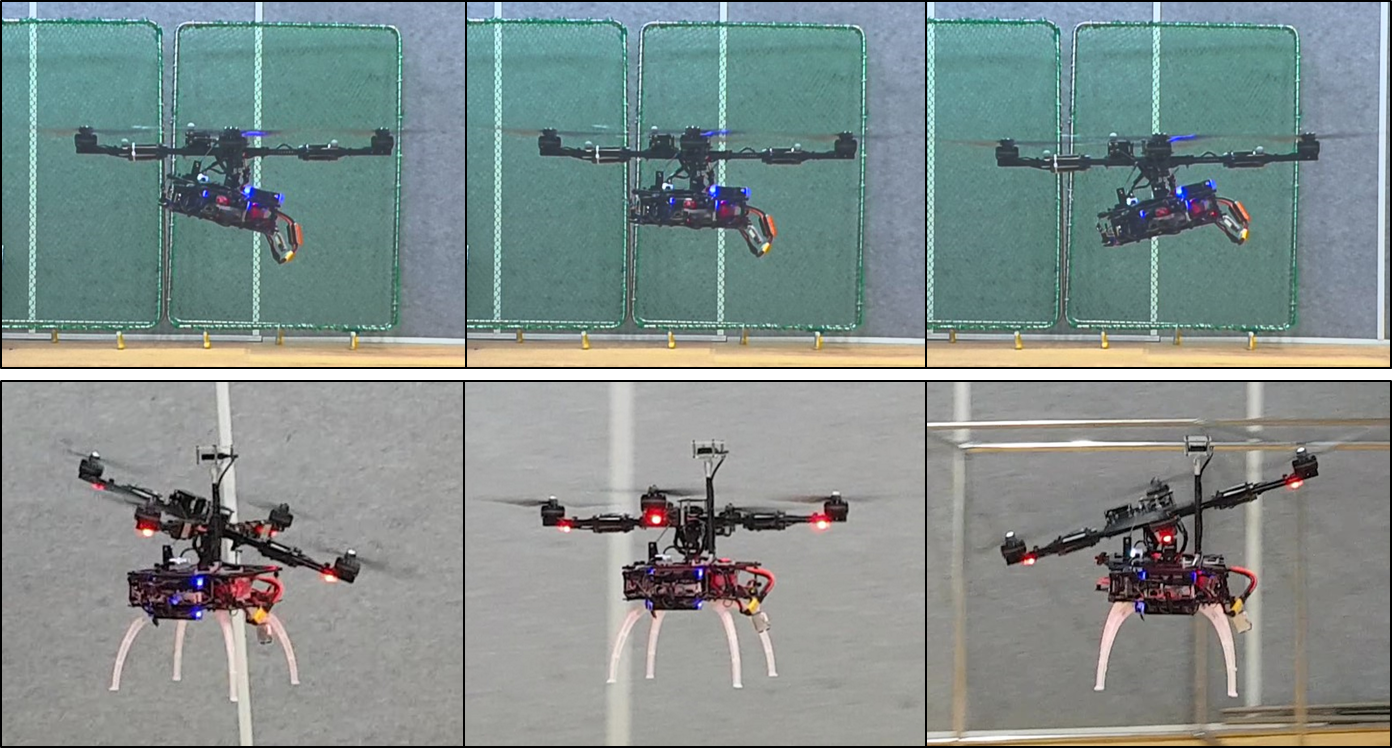
Autonomous aerial perching and unperching using omnidirectional tiltrotor and switching controller D. Lee,
S. Hwang,
J. Byun,
S. J. Lee,
and H. J. Kim
2024 IEEE International Conference on Robotics and Automation (ICRA) Paper |
Video
Minimally actuated tiltrotor for perching and normal force exertion D. Lee,
S. Hwang,
C. Kim,
S. J. Lee,
and H. J. Kim
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Paper |
Video
Cargo transportation strategy using T 3‑Multirotor UAV
S. J. Lee,
D. Lee,
and H. J. Kim
2019 IEEE International Conference on Robotics and Automation (ICRA) Paper